AI + 3D機器ビジョン、
1分で機械アームを掴む始める
立体ビジョン
(ステレオビジョン)
人間の両眼の働きを模倣し、物体の位置と構造を捉える原理に基づき、省電力で低コストという利点がありますが、遅延が発生しやすく、薄暗い環境では結果に影響を及ぼす可能性があります。これはロボットだけでなく、新興のAR + AIビジョン検出および識別システムにも応用されています。
飛行時間測距
(Time of Flight,TOF)
赤外線の反射時間を利用して物体間の距離を計算します。利点は高速かつ抵抗性がありますが、精度は低いです。

結構光
(Structured Light)
特殊な光パターン(通常は黒と白のストライプで、異なる方向に配置されています)を物体に投影し、光パターンの変形に基づいて物体表面の構造を計算します。同時に、Z軸の深度位置を高精度に取得します。現在、顔認識やAOI自動光学検査などの領域で広く利用されています。
AIによって、機械アームが物体を「理解」できるようになります。
一部の複雑な物体の認識では、3Dビジョンの精度と正確さだけでは困難があります。たとえば、複雑な形状の半透明の哺乳瓶の位置認識や、小さな部品や高精度な金属部品の機械アームの取り扱いが挙げられます。AIと3Dビジョンシステムをさらに統合することで、その認識能力を強化し、機械アームが物体を正確な向きや位置で取り扱えるようにします。
また、外形の不規則な極小工件の機械アームの取り扱いを考えます。3Dビジョンは小さな物体を認識できますが、外観が正方形や円形に限定されがちです。不規則な形状や複雑な形状の場合、認識が失敗することがよくあります。たとえば、M字型の金属部品が積み重なっているときに位置がズレることがあります。このような場合、AIの支援が必要で、物体を理解することが求められます。
1分で学習を完了する深層学習AI
3D機器ビジョンとAIの統合は難易度が高く、単に「見る」だけでなく、認識から把持までの過程、機械アームの経路計画や運動制御なども考慮する必要があります。
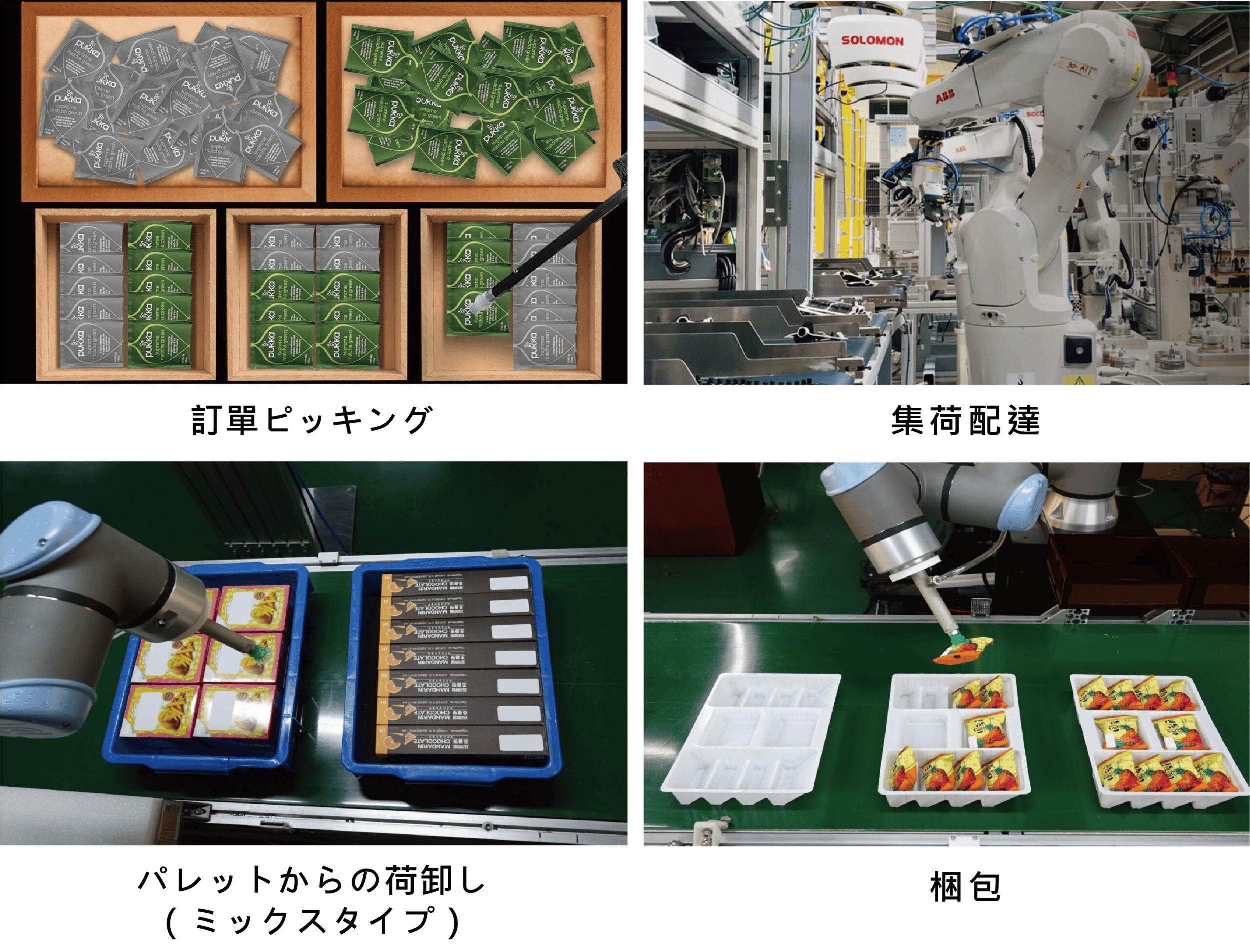
深層学習AIと動作計画モジュール(モーションプランニング)を組み合わせたロボットの把持システムは、最短1分でAIの学習を完了させることができます。これにより、ロボットは混合積み重ね(Mixed Depalletizing)、キット作成(Kitting)、ランダムビンピッキング(Random Bin Picking)などの要件に対応し、他の物体と衝突を回避しつつ、正確な方向や位置での把持を実現し、低コストで高効率な作業を実現します。
詳細なアプリケーションと情報については、こちらのリンクをクリックしてください。