JustPick智能3D分拣系统
JustPick 智能3D分拣系统
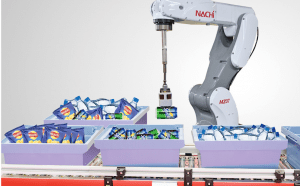
JustPick是可以解决分捡作业难题的机器人智能取放解决方案。
随着电商与在线购物全球市场的需求量大增,商家或物流业者须增加大量发货中心(fulfilllment center)及微发货中心,许多仓储、发货中心已全面启动自动化,唯独在分拣流程仍高度依赖人力运作,因为SKU(存货单位)数量相当高,机器无法一个一个对象学习辨识,市面上的机械手臂搭配视觉取放系统通常只能执行单一对象的取放。
所罗门自主研发的 JustPick智能分拣系统,运用先进的类神经网络技术,透过AI 3D视觉与深度学习,赋予机器人感知能力,如同装上眼睛与大脑,让机器人突破使用限制,机器人不需事先学习即能辨识各式不同形状、大小、外观的对象,无论是紧密排列、反光对象(会反光的铝箔纸包装等)、外表特征复杂或不规则的对象,JustPick智能分拣系统皆能成功辨识,并导引机器人完成夹取步骤。
所罗门JustPick整合AI视觉、手臂控制、条形码辨识与视觉导引吸嘴模块等技术,使物流业者能够快速布署取代人力拣取、包装、拆堆栈等工作,协助业者实现物流场域全面智动化。不仅适用物流业,也适用制造业的夹取作业。
挺进智慧物流,启动智能化,请找AI 3D视觉领导品牌-所罗门。
为什么选择所罗门 ” JustPick" ?
无须事先教导,可识别未知物料
提升分拣效率
兼容20家以上机器人品牌
节省人力,随时待命
JustPick 产业应用

快递包裹/邮务中心
物流快递公司与邮务中心,每天会收到大量包裹与邮件,现行分拣作业需要耗用大量人力,将包裹分拣到输送带或笼车上。所罗门Just Pick无须针对对象事先教导,即可透过AI 3D视觉辨识乱堆中的包裹,并规划机器人夹取路径,在最短时间内分拣包裹到指定位置。
适用:分拣机供包站、笼车供包站
适用:分拣机供包站、笼车供包站
电商仓储中心/物流发货中心
宅经济引爆物流商机,如何迅速、高效拣货与出货,成为电商及物流中心急需解决的自动化课题。JustPick AI 3D辨识技术,直觉设计快速导入现场,透过视觉引导机器人夹取上万种对象。除了考虑到精准夹取外,搭配AI摆放空间计算,达到装箱轻柔摆放及出货空间极大化的实际需求。
适用:中分拣站(拣至中转箱)、小分拣站(拣至出货箱)
适用:中分拣站(拣至中转箱)、小分拣站(拣至出货箱)

垂直式自动仓储/料塔拣货站
越来越多厂商导入自动仓储/料塔系统,拣货区常有隔板设计增加存放种类,自动拣货设计中,除了对象辩识外,手臂防撞功能在狭小空间中显得特别重要,在辨识对象的夹取点后,软件规划手臂于最短且安全的夹取路径完成任务。
适用:夹取空间狭小、对象紧密排列
适用:夹取空间狭小、对象紧密排列

垂直式自動倉儲/料塔揀貨站
视觉拆栈模块:
透过AI深度学习,省去传统工程须针对箱体以及排列方式做手臂教导的工程费用以及时间成本。
2. 视觉堆栈模块:
所罗门堆栈优化排列模块,根据来箱尺寸(可混箱)以及摆放箱在栈板的空间状况,计算出稳定的排列组合,并实现单/混箱堆栈空间利用极大化。
适用:越库拆堆栈、多品项混箱出货
透过AI深度学习,省去传统工程须针对箱体以及排列方式做手臂教导的工程费用以及时间成本。
2. 视觉堆栈模块:
所罗门堆栈优化排列模块,根据来箱尺寸(可混箱)以及摆放箱在栈板的空间状况,计算出稳定的排列组合,并实现单/混箱堆栈空间利用极大化。
适用:越库拆堆栈、多品项混箱出货
JustPick 四大优势
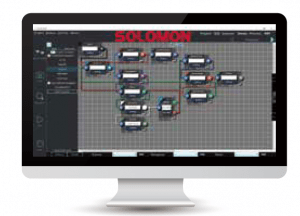
直觉式操作接口
免写程序,轻松导入
荣获德国红点设计大奖肯定的直觉式操作界面设计,用户仅要使用”拖拉”图形即能设定工作模块,无编程需求,欲分拣的对象不须事先利用CAD档训练学习,即可实时辨识,让使用者能快速上手。从手臂校正到对象取放,设定时间30分钟内即可完成。
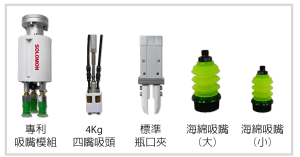
弹性对应对象多样化的夹爪系统
AI辨识对象尺寸
任何一款吸嘴或夹爪均无法全面处理各式样的品项。所罗门专利研发的「视觉导引吸嘴模块」可透过AI视觉分析不同对象尺寸并自动切换吸嘴数量,提高对象夹取率以及降低错夹率,并可针对特殊对象设计客制化夹爪快拆系统,提高对象多样适用性。
开放式应用平台取代封闭式开发环境 ─ 自由选择适应需求的硬件配置
JustPick采开放式平台,已与全球超过20个主要品牌机械手臂整合控制,可支持的品牌仍持续增加中;同时亦能与洛克威尔、西门子、三菱及奥姆龙等主要品牌PLC联结使用。Just Pick 3D支持机器手臂则包含多轴、SCARA、并联、直角坐标等各种类形,只要按照操作手册,即可轻松上手,无需费时学习各品牌机器人的示教器或运动控制程序设计。
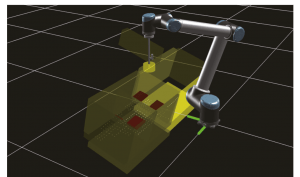
自主研发手臂运动路径系统
手臂防撞模块
JustPick的运动路径模块,可根据已辨识的物品/箱子尺寸及垛型找到适合手臂的摆放位置以及角度,以避免机械手臂行走路径碰撞障碍物,尤其是取放凌乱摆放在深型物料箱中的对象时,防碰撞路径规划有其必要性。