AccuPickCaso di Studio
Caricamento Automatizzato di Ingranaggi con l’Intelligenza Artificiale
Cliente
Il cliente è un grande produttore asiatico di componenti per il settore automobilistico.
Caso
Caricamento Automatizzato nella Produzione di Componenti per Auto
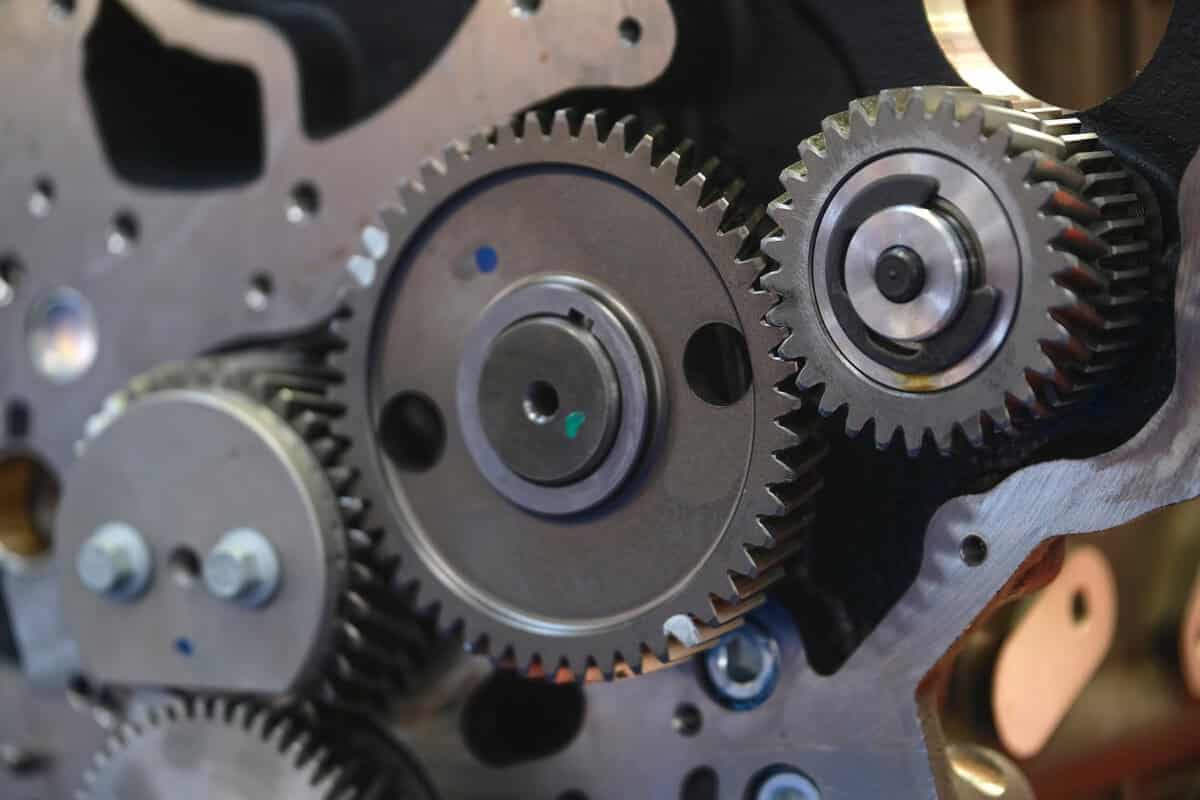
I produttori di componenti automobilistici si sono tradizionalmente affidati al lavoro manuale per le operazioni di carico.Questo metodo è intensivo in termini di manodopera, soprattutto a causa della grande quantità e del peso dei componenti metallici come gli ingranaggi.Di conseguenza, fattori come le condizioni ambientali e le capacità degli operatori possono causare variazioni nell’efficienza del caricamento.Per affrontare queste sfide, i produttori stanno adottando sempre più sistemi di caricamento automatizzati per migliorare l’efficienza produttiva e ridurre i rischi legati al lavoro manuale.
Sfida
Limitazioni dei Sistemi di Visione Industriale Tradizionali
Due tecnologie principali dominano attualmente l’automazione industriale: (1) l’uso di telecamere industriali posizionate nell’area operativa e (2) l’uso di telecamere montate su bracci robotici.Queste telecamere determinano con precisione la posizione relativa degli oggetti, facilitando la guida dei bracci robotici nelle operazioni di carico e scarico.Tuttavia, sorgono difficoltà in ambienti in cui l’illuminazione laterale degli oggetti è ostacolata da interferenze luminose ambientali.Inoltre, problemi come le dimensioni ridotte degli ingranaggi, i materiali riflettenti, la presenza di olio e l’impilamento disordinato dei pezzi nel cassone rappresentano ostacoli per i sistemi di visione tradizionali, compromettendo l’efficacia della presa del braccio robotico.
Soluzione
Caricamento Automatizzato di Ingranaggi con AccuPick
Utilizzando telecamere industriali e intelligenza artificiale avanzata, AccuPick apprende e classifica le condizioni di impilamento e gli angoli degli ingranaggi a partire da un numero ridotto di immagini.Il modulo di pianificazione del movimento di AccuPick calcola rapidamente il percorso ottimale del robot, consentendo al braccio robotico di prelevare con precisione gli ingranaggi da angolazioni diverse, evitando collisioni con il contenitore.